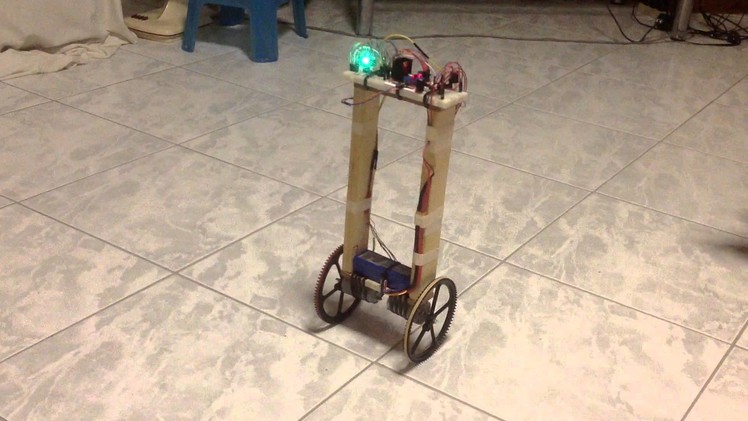
I built this self-balancing robot from cheap components and tuned the PID controller manually. Parts: MCU = ATmega328P Motors = 200RPM 12V geared Motor driver = L298N breakout Battery = Turnigy 2200mAh 3 cell 20C Gyro + accelerometer = MPU-6050 breakout W






")

")


