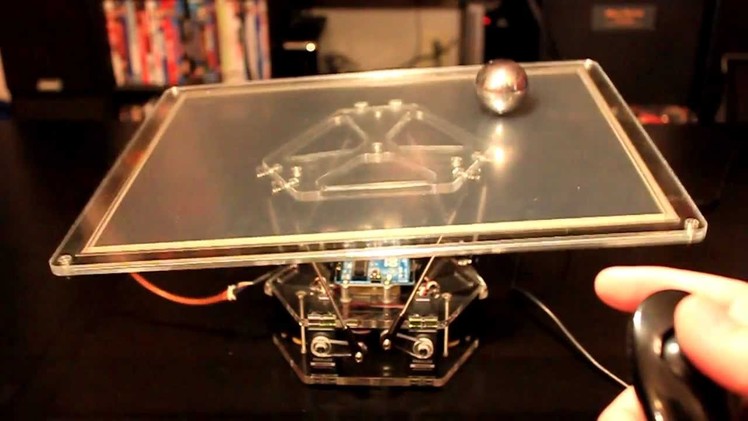
This is a semester project in mechatronic control systems at SJSU. The 6 DOF platform is a proof-of-concept prototype that we created for our senior project (motion simulator). Here, we are using 2 axes of the platform as the output from a PID controlle












