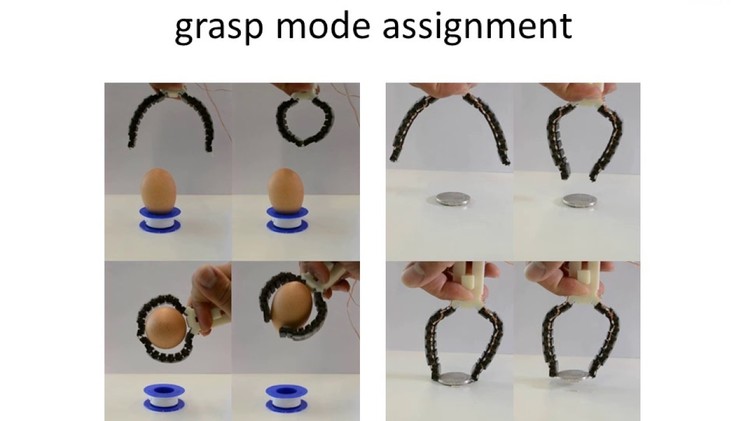
By Amir Firouzeh and Jamie Paik For more information refer to the following publications: 1- A. Firouzeh and J. Paik, " Grasp mode and compliance control of an under-actuated origami gripper using adjustable stiffness joints" IEEE/ASME Transactions on